
HiL-Simulation für die Entwicklung und den Test von Algorithmen für Lenksysteme
VDI-Tagung Mechatronik 2009, Wiesloch, 12.-13. Mai 2009
Dipl.-Ing. Thorben Herfeld,
DMecS - Development of Mechatronic Systems GmbH & Co. KG, Köln;
Dipl.-Ing. Jan Guderjahn, Dipl.-Ing. Thomas Schubert,
Prof. Dr.-Ing. Hermann Henrichfreise,
CLM - Cologne Laboratory of Mechatronics, FH Köln
Kurzfassung
In diesem Beitrag wird die Entwicklung von Algorithmen für elektromechanische Lenksysteme beschrieben. Diese Algorithmen erzeugen für ein momentengeregeltes Lenksystem aus verschiedenen fahrdynamischen Größen, wie Reifenkräften oder Schräglaufwinkeln, die Sollgröße für das dem Fahrer vermittelte Lenkmoment. Die Algorithmen sind somit für das wahrgenommene Lenkgefühl verantwortlich und können des Weiteren den Fahrer in kritischen Fahrsituationen unterstützen.
Für die Entwicklungsarbeit kommt ein HiL-Prüfstand mit Feedback-Lenkrad zum Einsatz. Dieser HiL-Prüfstand wird aufgrund der haptischen Rückmeldung an den Fahrer für die konzeptionelle Entwicklung und Vorabstimmung der Algorithmen genutzt. Damit werden aufwendige Tests vom Fahrversuch in die frühere Entwicklungsphase der Simulation verlagert.
Veröffentlichung und Vortrag downloaden:
1 Einleitung
Stetig steigende Ansprüche an Energieeffizienz, Komfort und Sicherheit sind die treibenden Kräfte in der Entwicklung mechatronischer Systeme im Kraftfahrzeug. Diese Anforderungen gelten besonders für den Bereich der Lenksysteme. Hier setzen sich zunehmend elektrische Servolenkungen (electric power steering, EPS) durch, die in ihrer Funktionalität durch den Einsatz von Software (Steuerung und Regelung) ständig erweitert werden.
Ein solches EPS-System bietet gegenüber einer konventionellen Lenkung den Vorteil, dass ein gewünschtes Lenkmoment und damit das Lenkgefühl über einen geeigneten Algorithmus eingestellt werden kann. Der Algorithmus kann dabei z.B. auf Größen der fahrdynamischen Situation wie Lenkwinkel, Fahrzeuggeschwindigkeit oder Reifenkräfte zurückgreifen.
Für eine effiziente Entwicklung solcher Algorithmen kommt in diesem Beitrag ein HiL-Prüfstand mit einem Feedback-Lenkrad zum Einsatz [1]. Dieses Feedback-Lenkrad ermöglicht aufgrund der haptischen Rückmeldung eine Analyse der Akzeptanz des vermittelten Lenkgefühls durch den Entwickler. Eine Vorabstimmung des Lenkgefühls erfolgt somit bereits am HiL-Prüfstand vor der Durchführung von Fahrversuchen.
2 HiL Prüfstand für Lenksysteme
Bild 1 zeigt die Struktur des HiL Prüfstands mit seinen Komponenten und deren Zusammenwirken.
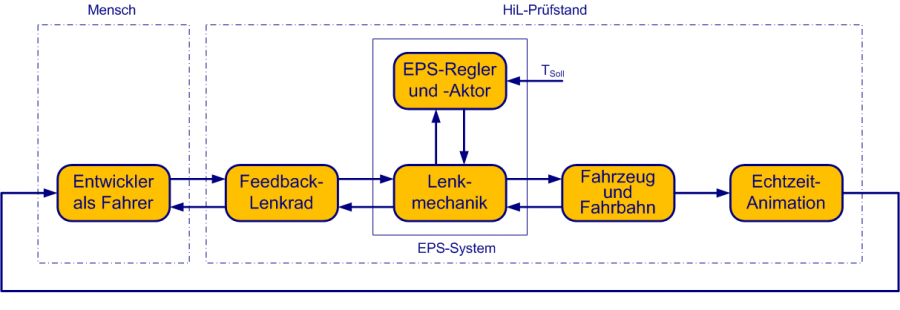
Bild 1: Struktur des HiL Prüfstands mit Fahrer
Der HiL Prüfstand besteht aus dem Feedback Lenkrad als Hardware Komponente sowie aus Modellen für Fahrzeug und Fahrbahn und für das EPS System. Diese Modelle sind auf einem dSPACE Simulator implementiert.
Das Feedback Lenkrad als Schnittstelle zwischen Mensch und Echtzeitsimulation ermöglicht dem Entwickler über die haptische Rückmeldung die unmittelbare Untersuchung des vermittelten Lenkgefühls. Damit unterstützt der HiL Prüfstand die Beurteilung des Lenkgefühls und die Formulierung von Anforderungen an das zugehörige Lenkmoment. Das Feedback Lenkrad basiert auf einem geregelten elektrischen Aktor. Aufgrund der Regelung wirken sich Störungen durch Reibung und Ungleichförmigkeiten, wie sie z.B. durch Rastmomente entstehen, nicht auf das vermittelte Lenkgefühl aus. Zusätzlich erhält der Fahrer eine visuelle Rückmeldung des dynamischen Verhaltens des Fahrzeugs über die Echtzeitanimation.
Für Fahrzeug und Fahrbahn kommt ein Modell aus dem Virtual Automotive Environment [2] zum Einsatz. Das Modell für die Lenkmechanik des EPS Systems berücksichtigt sämtliche sich auf das Lenkmoment auswirkende Effekte. Der verwendete EPS Regler stellt unabhängig von den auf das Lenksystem wirkenden äußeren Kräften und Momenten über den EPS Aktor ein Lenkmoment für den Fahrer ein [3]. Sollwerte TSoll für dieses Lenkmoment können mit Hilfe von geeigneten Algorithmen erzeugt werden.
In Bild 2 ist der HiL Prüfstand im Einsatz für die Entwicklung solcher Algorithmen zu sehen.

Bild 2: HiL-Prüfstand im Entwicklungseinsatz
3 Algorithmen für Lenkgefühl
In [4] wird ein Algorithmus vorgestellt, mit dem ein Lenkgefühl ähnlich einer hydraulischen Servounterstützung vorliegt. Dieser Algorithmus wird hier bei geringen Fahrzeuggeschwindigkeiten zur Vermittlung eines Grundlenkgefühls genutzt.
Für höhere Fahrzeuggeschwindigkeiten kommt in diesem Beitrag ein alternativer Ansatz zur Anwendung. Der zugehörige Algorithmus erzeugt ein Solllenkmoment aus den Reifenseitenkräften an den Vorderrädern, da diese wesentliche Größen für die Rückmeldung der Fahrbahnverhältnisse an den Fahrer darstellen [5]. Mit diesen Kräften und einem synthetischen Nachlauf wird ein die Lenkung zentrierendes Moment berechnet, aus dem mit Hilfe von Kennlinien ein Solllenkmoment für den Fahrer erzeugt wird. Der synthetische Nachlauf und