
HiL-Simulation für die Entwicklung von Lenksystemen
8. Tagung Hardware-in-the-Loop Simulation 2008, Kassel, 16.-17. September 2008
T. Herfeld
DMecS Development of Mechatronic Systems GmbH und Co. KG,
Gottfried-Hagen-Straße 20
51105 Köln
info@dmecs.de
www.dmecs.de
J. Guderjahn, E. Blaj, H. Henrichfreise,
Fachhochschule Köln
Labor für Mechatronik (Cologne Laboratory of Mechatronics, CLM),
Betzdorfer Str. 2
50679 Köln
info@clm-online.de
www.clm-online.de
Kurzfassung
In diesem Beitrag wird der Aufbau eines HiL-Prüfstandes für die Entwicklung von Lenksystemen, bestehend aus einem Simulationsmodell einer Lenkung und einem Torque- Feedback-Lenkrad, beschrieben. Der Aufbau vermittelt ein realistisches Lenkgefühl und kann so für Entwicklungsarbeiten eingesetzt werden, wie hier am Beispiel einer EPSLenkung vorgestellt wird.
Der HiL-Prüfstand kann aufgrund der haptischen Rückmeldung des Lenkmomentes an den Fahrer über das Feedback-Lenkrad für die konzeptionelle Entwicklung und Vorabstimmung unterschiedlicher Lenksysteme genutzt werden. Damit werden Tests, die üblicherweise mit Prototypen durchgeführt werden, in die frühere Entwicklungsphase der Simulation verlagert. Auf diese Weise wird der erforderliche Aufwand im Fahrversuch reduziert und somit eine Effizienzsteigerung und Kostenoptimierung durch kürzere Entwicklungszeiten erreicht.
Veröffentlichung und Vortrag downloaden:
1 Einleitung
Stetig steigende Ansprüche an Energieeffizienz, Komfort und Sicherheit sind die treibenden Kräfte in der Entwicklung mechatronischer Systeme im Kraftfahrzeug. Diese Anforderungen gelten besonders für den Bereich der Lenksysteme. Hier setzen sich zunehmend elektrische Servolenkungen durch, die in ihrer Funktionalität durch den Einsatz von Software (Steuerung und Regelung) ständig erweitert werden.
Hinzu kommt ein steigender Wettbewerbsdruck, der zunehmende Effizienzsteigerungen und kürzere Entwicklungszeiten fordert. Daraus entsteht ein Bedarf an innovativer Entwicklungsmethodik. Eine Möglichkeit, dem zu begegnen, ist die Verlagerung von Tests mit Prototypen in die HiL-Simulation.
In der Entwicklung von Lenksystemen können z.B. aufwendige Tests vom Fahrzeug an einen HiL-Prüfstand verlagert werden. Zu diesem Zweck hat das Kölner Labor für Mechatronik (Cologne Laboratory of Mechatronics, CLM) an der Fachhochschule Köln in einem Kooperationsprojekt mit der DMecS GmbH & Co. KG ein Torque-Feedback-Lenkrad für die Entwicklung von Lenksystemen aufgebaut. Dieses ermöglicht es, eingebunden in die HiL-Simulation mit einem detaillierten Modell einer Lenkung, ein realistisches Lenkgefühl zu vermitteln. Den so aufgebauten HiL-Prüfstand zeigt Bild 1.1.

Bild 1.1 Realisierter HiL-Prüfstand mit Feedback-Lenkrad
Das Systemverhalten einer Lenkung kann mit diesem HiL-Prüfstand in der frühen Entwicklungsphase der Simulation konzeptionell entwickelt und analysiert, durch konstruktive und regelungstechnische Maßnahmen optimiert und vor der Durchführung von Fahrversuchen vorabgestimmt werden. Diese Vorgehensweise wird im Folgenden anhand einer realisierten EPS-Lenkung vorgestellt.
2 Gesamtsystem
Das nebenstehende Bild zeigt die schematische Darstellung einer EPS-Lenkung im Fahrzeug-Gesamtsystem. Die Lenkung, bestehend aus der Lenkmechanik und dem EPS-Aktor mit Regler, steht mit dem Fahrzeug und der Fahrbahn
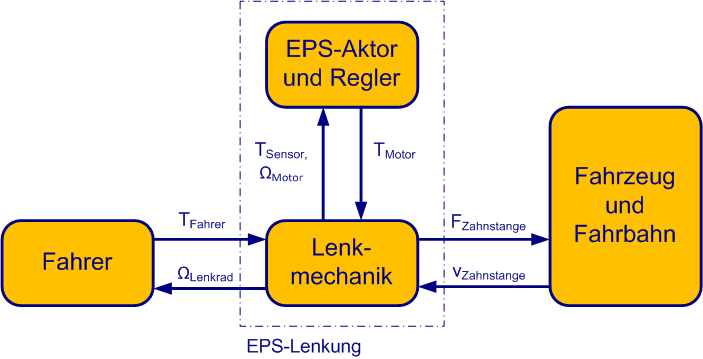
Bild 2.1 EPS-Lenkung im Fahrzeug-Gesamtsystem
sowie dem Fahrer in Wechselwirkung. Für die Realisierung des Gesamtsystems aus Bild 2.1 im HiL-Prüfstand werden verschiedene echtzeitfähige Modelle benötigt, die im Folgenden erläutert werden.
2.1 Modelle
Für die Lenkmechanik der EPS-Lenkung wird für die Vermittlung eines realistischen Lenkgefühls ein detailliertes Modell benötigt, das sämtliche Effekte beinhaltet, die sich auf das Lenkmoment auswirken. Dazu werden in einem Mehrkörpermodell alle Trägheiten, Reibungen, Elastizitäten und Übersetzungen