
Optimale Regelung einer elektromechanischen Servolenkung
5. VDI Mechatronik Tagung 2003, Innovative Produktentwicklung, Fulda, 07.-08. Mai 2003.
Hermann Henrichfreise
Labor für Mechatronik (CLM), Fachhochschule Köln, www.clm-online.de
Jürgen Jusseit
DMecS - Development of Mechatronic Systems GmbH & Co. KG, Köln, www.dmecs.de
Harwin Niessen
Mercedes-Benz Lenkungen GmbH (MBL), Entwicklungszentrum Esslingen
Kurzfassung
Der Beitrag beschreibt die Modellbildung sowie den Entwurf und die Inbetriebnahme einer beobachterbasierenden Zustandsregelung für eine elektromechanische Servolenkung. Die Vorgabe eines Sollhandmoments als Führungsgröße vermittelt dem Fahrer am Lenkrad ein gewünschtes Lenkgefühl. Durch den Entwurf einer optimalen und robusten Regelung mit Hilfe des LQG/LTR-Verfahrens sowie die Beobachtung und Aufschaltung der am System angreifenden Störgrößen weist das geregelte System ein sehr gutes Führungs- und Stör-verhalten auf. Die Regel¬größe folgt auch bei schnellen Lenkvorgängen der vorgegebenen Führungsgröße in einem sehr engen Toleranzband. Dieses Verhalten wird sowohl durch Simulation als auch durch Messungen am realen Fahrzeug belegt. Die vorgestellte Regelung erfüllt die Anforde¬rungen an ein modernes Lenksystem. Sie ermöglicht die Anpassung des Lenkgefühls an die jeweilige Fahrsituation und bleibt dabei robust.
Veröffentlichung (Paper) downloaden:
1 Einleitung
Die Entwicklung neuartiger Lenksysteme wird maßgeblich durch die Forderungen nach mehr Fahrsicherheit und Lenkkomfort bestimmt. Bis zur Einführung von Steer-by-Wire-Systemen werden neben den bislang marktbeherrschenden hydraulischen Lenkungen zunehmend elektromechanische Servolenkungen (Electric Power Assisted Steering, EPAS) eingesetzt, bei denen die Lenkunterstützung mit Hilfe eines Elektromotors realisiert wird [1, 2]. Der Wegfall der Hydraulikkomponenten (Pumpe, Ölbehälter und Hydraulikleitungen) hat eine Reduktion der Kosten und der Variantenvielfalt von Lenkungskomponenten sowie eine verbesserte Umweltbilanz zur Folge. Zudem kann die Lenkungsregelung leicht mit anderen Fahrzeugsystemen, z.B. einem ESP, kombiniert oder um Assistenzfunktionen, z.B. für automatisches Einparken und Spurhalten, erweitert werden.
In einer Kooperation des Labors für Mechatronik der Fachhochschule Köln (Cologne Laboratory of Mechatronics, CLM) mit der Mercedes-Benz Lenkungen GmbH wurde eine modellbasierende Regelung für eine elektromechanische Servolenkung entwickelt, die den oben genannten Forderungen an eine moderne Fahrzeuglenkung Rechnung trägt. Für die Formulierung der Regelungsaufgabe war dabei zunächst die prinzipielle Funktion der Lenkung im Fahrer-/Fahrzeugsystem von Bedeutung. Bild 1 zeigt dazu in vereinfachter Form die Integration der geregelten elektromechanischen Servolenkung, des EPAS-Systems, in das Fahrer-/Fahrzeugsystem.
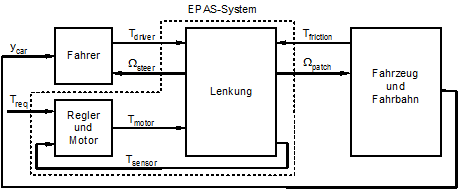
Bild 1: EPAS-System im Fahrer-/Fahrzeugsystem
Die Lenkung ermöglicht dem Fahrer die Querführung und Stabilisierung des Fahrzeuges. Dabei schließt der Fahrer als Regler einen äußeren Regelkreis für die Querposition ycar des Fahrzeuges auf der Fahrbahn. Die Stellgröße dieser Regelung ist das Handmoment Tdriver am Lenkrad, über das die Querabweichung klein gehalten wird. Dieser äußeren Regelung durch den Fahrer ist ein innerer Regelkreis für das EPAS-System unterlagert, in dem ein Elektromotor das Unterstützungsmoment Tmotor für die Servowirkung erzeugt. Die zugehörige Regelgröße ist das an einem Drehstab in der Lenksäule erfasste Sensormoment Tsensor. Dieses ist bei konstantem Lenkwinkel gleich dem am Lenkrad eingeleiteten Handmoment, das dem Fahrer ein Lenkgefühl vermittelt. Die Aufgabe der Regelung besteht nun darin, das Sensormoment als Ersatz für das Handmoment einem vorgegebenen Sollhandmoment Treq möglichst gut nachzuführen. Das Handmoment selbst und das Reibmoment Tfriction aus dem Kontakt zwischen Reifen und Fahrbahn stellen dabei für die betrachtete Regelung Störgrößen dar.
Auf den Entwurf und die Realisierung der unterlagerten Regelung für das EPAS-System wird im weiteren Verlauf des Beitrags genauer eingegangen. Grundlage für den Entwurf der Regelung und die Analyse des geregelten Systems durch Simulation sind geeignete Modelle der Regelstrecke.
2 Regelstrecke und Modellbildung
Bild 2 zeigt schematisch den Aufbau der Regelstrecke, einer von der Mercedes-Benz Lenkungen GmbH entwickelten elektromechanischen Servolenkung für Fahrzeuge mit hohen Zahnstangenkräften, z.B. einer C-Klasse von Mercedes-Benz, und einem Bordnetz mit 42 V Versorgungsspannung.
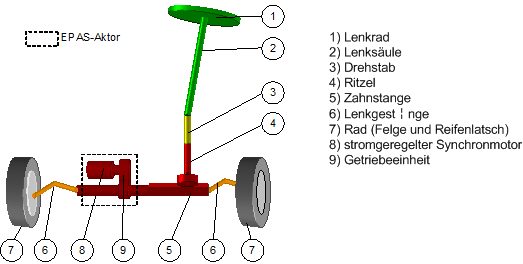
Bild 2: Regelstrecke
Das vom Fahrer am Lenkrad eingeleitete Handmoment wird über die Lenksäule und einen elastischen Drehstab auf ein Ritzel-Zahnstange-System übertragen. Die resultierende Kraft bewegt die Zahnstange und über die beiden Lenkgestänge die Räder. Diese Bewegung wird durch den so genannten EPAS-Aktor unterstützt. Er besteht aus einem stromgeregelten Synchronmotor und einer spielfreien Getriebeeinheit, die das Unterstützungsmoment des Motors in eine Unterstützungskraft an der Zahnstange übersetzt. Die Ansteuerung des Systems erfolgt über eine Spannungsschnittstelle für den drehmoment¬bildenden Strom im Synchronmotor. Der Spannungssollwert ist die Stellgröße für die Regelung. Als Messgrößen stehen die Motorwinkelgeschwindigkeit, der Verdrehwinkel am Drehstab und der drehmomentbildende Motorstrom zur Verfügung.
Die betrachtete Lenkung ist ein schwingungsfähiges System. Der elastische Drehstab bewirkt eine Schwingung mit einer Frequenz von ca. 9 Hz. Höherfrequente Schwingungen entstehen durch die elastischen Lenkgestänge und die Elastizität der Reifen.
Die Herleitung eines mathematischen Modells der Regelstrecke erfolgt für den mecha¬nischen Anteil mit Hilfe des in Bild 3 dargestellten physikalischen Ersatzmodells. Es berück¬sichtigt die Trägheitsmomente von Lenkrad und Lenksäule Jsteer, von Motor und Getriebeeinheit des EPAS-Aktors Jmotor, des Ritzels Jpinion, der Felgen Jrim, der Reifenlatsche Jpatch sowie die Zahnstangenmasse mrack. Der elastische Drehstab wird durch eine Feder mit der Steifigkeit csensor und der Materialdämpfung bsensor nachgebildet. Für die Elastizität der Lenkgestänge werden Federn mit der Steifigkeit clinkage und der Materialdämpfung blinkage angesetzt. In gleicher Weise wird die Elastizität der Reifen mit Hilfe von Federn mit der Steifigkeit ctire und der Materialdämpfung btire modelliert. Die Dämpfungskonstanten bsteer für das Lenkrad und die Lenksäule sowie bmotor für den Motor und die Getriebeeinheit bilden die im System vorhandenen viskosen Reibungen ab. Das Ersatzmodell enthält ferner die konstanten Übersetzungen ipinion und igear des Ritzel-Zahnstange-Systems und der Getriebeeinheit des EPAS-Aktors. Die Übersetzungen ilinkage,l und ilinkage,r der Lenkgestänge sind ungleichförmig. Die nichtlinearen Übersetzungs¬verhältnisse werden über die Kinematik der Lenkgestänge beschrieben. Ein weiteres nicht¬lineares Phänomen ist trockene Reibung in der Getriebeeinheit, die durch das Reibmoment Tfrgear berücksichtigt wird. Ebenso enthält das Ersatzmodell die Reibmomente Tfrpatch,l und Tfrpatch,r zwischen den Reifenlatschen und der Fahrbahn. Die Gewichtskraft des Fahrzeuges bewirkt über die Achskinematik an der Vorderachse eine von der Zahnstangenposition abhängige Rückstellkraft. Diese wird durch eine Feder mit der Steifigkeit crack und der Materialdämpfung brack dargestellt.
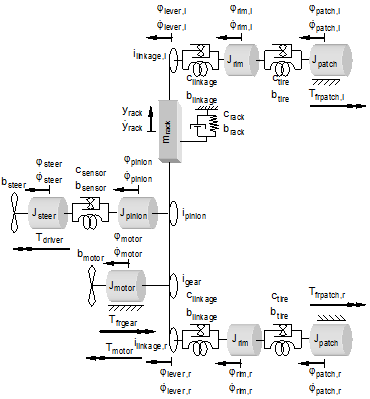
Bild 3: Physikalisches Ersatzmodell
Bei dem beschriebenen Modell handelt es sich um ein detailliertes nichtlineares Modell der Regelstrecke. Es wurde in Form eines hierarchisch strukturierten Simulationsmodells in der Entwicklungsumgebung MATLAB/Simulink