
DMecS Steer-by-Wire Prüfstände
Unsere Prüfstände für Steer-by-Wire Systeme werden für das Testen von Aktuatoren für das Fahrerhandmoment (HWA) und von Aktuator Power Packs für das Moment zur Auslenkung der Räder (RWA) eingesetzt. Den jeweiligen Steer-by-Wire Prüfstand entwickeln wir individuell für Sie, z.B. als kombinierten Prüfstand für HWA und RWA Power Packs oder als einzelne, miteinander verbundene DMecS Power Pack Prüfstände. Ihren bestehenden Prüfstand erweitern wir mit entsprechenden Komponenten. Der modulare Aufbau der Prüfstandsoftware ermöglicht eine
- einfache Integration in die Struktur der Kundensoftware
- einfache Bedienung
Testautomatisierungen und automatisierte Prozesse wie Initialisierungen sind einfach durchzuführen. Eine Übersicht über die DMecS Prüfstände für Steer-by-Wire Systeme ist mit der SbW-TB Übersichtspräsentation gegeben.
Anwendung des Prüfstands
Mit dem Prüfstand für Steer-by-Wire Systeme werden die Prüflinge in einer realistischen Umgebung getestet. Dabei werden die
- inneren mechanischen Eigenschaften akkurat erfasst
- Parameter/ Eigenschaften des Prüflings präzise und zuverlässig bestimmt
- Optionen bereitgestellt, Signale und/ oder die Stromversorgung zu manipulieren
Nicht messbare Parameter/ Eigenschaften können via Parameteridentifikation bestimmt werden. Es gibt keinen negativen Einfluss des Prüfstands auf die Ergebnisse z.B. durch Schwingungen.
Prüfstandsaufbau
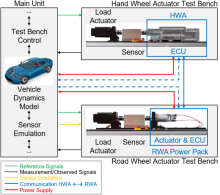
Der Aktuator für das Fahrerhandmoment (HWA) und der Aktuator Power Pack für das Moment zur Auslenkung der Räder (HWA) können gemeinsam oder einzeln als Prüflinge eingesetzt werden. Sowohl Messinstrumente sind berücksichtigt als auch Beobachter für die nicht messbaren Größen. Der Prüfstand zeichnet sich aus durch die
- dSPACE real-time Hardware
- hochdynamische Prüfstandregelung
- große Stabilitätsreserve
- realistische simulierte Testumgebung
Elektrische Motoren mit Leistungselektronik werden als Prüfstandaktuatoren für das Einprägen von gegebenen/ simulierten mechanischen Lasten eingesetzt.
Regelungskonzept
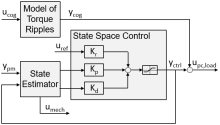
Die eingesetzten Regler stellen die optimale Dynamik des gesamten Systems sicher. Beobachter schätzen die Zustände der Strecke sowie die Störgrößen. Es werden Kompensationen durchgeführt für die
- geschätzten Störgrößen
- Momentenwelligkeit (z.B. aufgrund von Rastmomenten)
mit Hilfe eines entsprechenden Modells
Mechanische Größen (z.B. Moment, Position oder Geschwindigkeit von der HiL-Simulation) an der Welle des Prüflings werden schnell und präzise angepasst.