
DMecS Steer-by-Wire Test Benches
Our test benches for Steer-by-Wire systems are employed for the testing of hand wheel actuators (HWA) and road wheel actuator (RWA) power packs. We develop the respective test bench individually for you e.g., a combined test bench for HWA and RWA power pack or individual, connected DMecS power pack test benches. We enhance your existing test bench with respective components. The modular composition of the test bench software allows for
- easy integration into structure of customer software
- simple operation
Test automation and automated processes such as initializations can be performed easily. An overview over the DMecS test benches for Steer-by-Wire systems is given by the SbW-TB Overview Presentation.
Test Bench Application
With the test bench for Steer-by-Wire systems the devices under test are being tested in a realistic environment. Thereby the
- internal mechanical quantities are applied accurately
- parameters/ properties of the device under test are determined precisely and reliably
- option is given to manipulate signals and/ or the power supply
Non-measurable parameters/ properties can be determined via parameter identification. There is no negative impact of the test bench on test results through i.e., test bench induced oscillations.
Test Bench Set Up
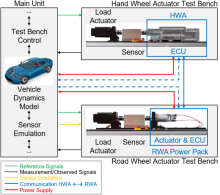
The hand wheel actuator (HWA) and the road wheel actuator (RWA) power pack can be deployed together or individually as devices under test. Measuring instrumentations are considered, as well as observers for non-measurable states. The test bench is characterized by the
- dSPACE real-time hardware
- highly dynamic test bench control
- high stability margin
- simulated test environment
Electric motors with power electronics are deployed as test bench actuators for imprinting given/ simulated mechanical loads.
Controller Concept
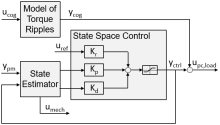
The implemented controllers account for the optimal dynamics of the entire system. Observers estimate the plant states as well as the disturbances. Compensation is conducted for the
- estimated disturbances
- torque ripples (from e.g., cogging torques)
by means of a suitable model
Mechanical quantities (e.g., torque, position, or velocity from HiL-simulation) at the shaft of the device under test get adjusted fast and precisely.