
Variable Lenkunterstützung für eine elektromechanische Servolenkung
23. Tagung „Elektronik im Kfz“, Haus der Technik - Essen. 17. - 18. Juni 2003, Stuttgart
O. Graßmann, H. Henrichfreise, H. Niessen, K. v. Hammel
Kurzfassung
Der Beitrag beschreibt die Realisierung einer vom Fahrzustand abhängigen, variablen Lenkunterstützung für eine elektromechanische Servolenkung. Eine unterlagerte beobachterbasierende Zustandsregelung ermöglicht die Vorgabe eines auf die Fahrsituation zugeschnittenen Soll-Handmoments (Lenkgefühl). Die Zustandsregelung stellt das gewünschte Soll-Handmoment schnell und genau ein und liefert kontinuierlich Schätzwerte für die Reibung zwischen Reifen und Fahrbahn (Fahrbahnkontakt). Für die direkte Vorgabe des Lenkgefühls wird ein neuartiges Konzept mit Kennlinien vorgestellt, bei dem gegenüber herkömmlichen hydraulisch unterstützten Lenkungen Ursache und Wirkung umgekehrt werden. Hierbei kommt die geschätzte Reibung aus der unterlagerten Regelung zum Einsatz. In enger Zusammenarbeit mit Testfahrern wurde eine Benutzeroberfläche zur gezielten und einfachen Einstellung wichtiger Lenkeigenschaften durch den Tester und die automatische Parametrierung der Kennlinien im Hintergrund entwickelt.
Veröffentlichung (Paper) downloaden:
1 Einleitung
In modernen Fahrzeugen werden konventionelle hydraulische Servolenkungen zunehmend durch elektrohydraulische und elektromechanische Lenkungen ersetzt. Dieser Trend wird durch Forderungen nach mehr Fahrsicherheit und Lenkkomfort sowie der Reduktion von Variantenvielfalt und Kosten bestimmt. Durch aktiven Eingriff in die Lenkung über Elektronik und Informationsverarbeitung kann in modernen Lenksystemen das Lenkgefühl an den Fahrzeugtyp und die jeweilige Fahrsituation angepasst werden. Zudem kann durch höherwertige Funktionen wie automatisches Einparken, Spurhalten sowie durch Überlagerung eines zusätzlichen Lenkwinkels eine Verbesserung von Fahrkomfort, Fahrdynamik und Sicherheit erreicht werden.
Die primäre Funktion einer Lenkung besteht in der Querführung des Fahrzeugs [1]. Dabei soll sie dem Fahrer ein sicheres und komfortables Lenkgefühl vermitteln. Ein sicheres Lenkgefühl zeichnet sich durch guten Kontakt zur Fahrbahn aus. Die Komforteigenschaften werden durch das Ansprechverhalten der Lenkung auf den Fahrereingriff bestimmt. Dazu muss das Lenksystem entsprechend der Abstimmung auf sich ändernde Fahrbahneigenschaften und Lenkeingriffe des Fahrers reagieren. Bei elektrohydraulischen und elektromechanischen Servolenkungen ist eine wichtige Forderung die Robustheit des Regelungssystems.
In einem Kooperationsprojekt des Labors für Mechatronik der Fachhochschule Köln (Cologne Laboratory of Mechatronics, CLM) mit der Mercedes-Benz Lenkungen GmbH wurde eine elektromechanische Servolenkung (Electric Power Assisted Steering, EPAS) mit variabler, an den jeweiligen Fahrzustand angepasster Lenk¬unterstützung entwickelt, welche die oben genannten Forderungen erfüllt. Der Beitrag beschreibt den Aufbau der Lenkung und das verwendete Regelungskonzept. Dabei wird besonders auf die Bereitstellung einer variablen Lenkunterstützung durch die Vorgabe eines angepassten Lenkgefühls eingegangen.
2 Elektromechanische Servolenkung
Bild 1 zeigt schematisch den Aufbau der entwickelten elektromechanischen Servolenkung für Fahrzeuge mit hohen Zahnstangenkräften, z.B. einer C-Klasse von Mercedes-Benz, und einem Bordnetz mit 42 V Versorgungsspannung.
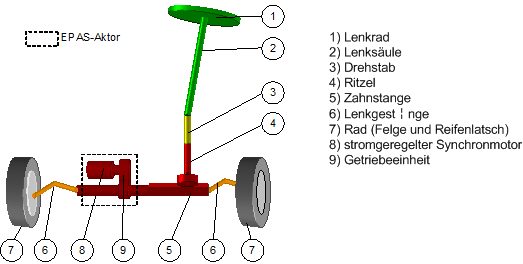
Bild 1: Elektromechanische Servolenkung
Das vom Fahrer am Lenkrad eingeleitete Handmoment wird über die Lenksäule und einen elastischen Drehstab auf ein Ritzel-Zahnstange-System übertragen. Die resultierende Kraft bewegt die Zahnstange und über die beiden Lenkgestänge die Räder. Diese Bewegung wird durch den so genannten EPAS-Aktor unterstützt. Er besteht aus einem stromgeregelten Synchronmotor und einer spielfreien Getriebe¬einheit, die das Unterstützungsmoment des Motors in eine Unterstützungskraft an der Zahnstange übersetzt. Die betrachtete Lenkung ist ein schwingungsfähiges System. Der elastische Drehstab bewirkt eine Schwingung mit einer Frequenz von ca. 9 Hz.
Zusammen mit dem EPAS-Regler bildet die vorgestellte Lenkung das so genannte EPAS-System. Dieses ist im folgenden Bild eingebettet in das Fahrer-/Fahrzeug¬system dargestellt.
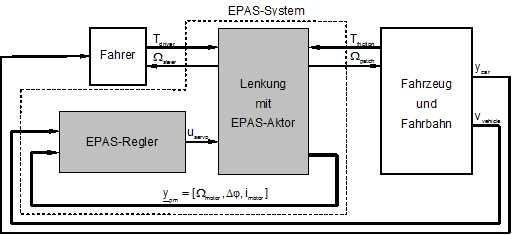
Bild 2: EPAS-System im Fahrer-/Fahrzeugsystem
Die Lenkung ermöglicht dem Fahrer die Querführung und Stabilisierung des Fahr¬zeugs. Dabei schließt der Fahrer einen äußeren Regelkreis für die Querposition ycar des Fahrzeugs auf der Fahrbahn. Die Stellgröße des äußeren Regelkreises ist das vom Fahrer eingeleitete Handmoment Tdriver. Dieser äußeren Regelung durch den Fahrer ist ein innerer Regelkreis für das EPAS-System unterlagert, in dem der EPAS-Aktor das Unterstützungsmoment für die Servowirkung erzeugt. Die Ansteuerung des EPAS-Aktors erfolgt über eine Spannungsschnittstelle mit der Ein¬gangsspannung uservo für den drehmomentbildenden Motorstrom imotor. Als Mess¬größen stehen die Motorwinkelgeschwindigkeit motor, der Verdrehwinkel ∆ am Dreh¬stab sowie der Strom imotor zur Verfügung.
Für die Querführung des Fahrzeugs ist die Summe der zwischen den Reifenlatschen und der Fahrbahn auftretenden Reibmomente in der Größe Tfriction durch das Handmoment des Fahrers und das unterstützende Motormoment zu überwinden. Die Regelgröße für den EPAS-Regler ist das Moment Tsensor am elastischen Drehstab, das proportional zum Verdrehwinkel ∆ ist. Es ist bei konstantem Lenkwinkel gleich dem am Lenkrad eingeleiteten Handmoment, das dem Fahrer das Lenkgefühl vermittelt. Das Handmoment Tdriver und das Reibmoment Tfriction stellen für den Entwurf des EPAS-Reglers Störgrößen dar (vgl. Bild 2).
Der entwickelte EPAS-Regler setzt sich aus den in Bild 3 dargestellten Subsystemen zusammen.
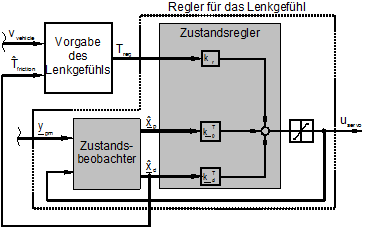
Bild 3: Subsysteme des EPAS-Reglers
Eine beobachterbasierende Zustandsregelung mit Führungs- und Störgrößenauf¬schaltung [2,3,4] sorgt für das schnelle und genaue Einstellen eines Lenkgefühls über die Regelgröße Tsensor. Das gewünschte Lenkgefühl wird dem Fahrer durch die Aufschaltung eines geeigneten Sollhandmoments Treq als Führungsgröße vermittelt.
Die Rückführung der durch einen linearen Zustandsbeobachter geschätzten Zustandsgrößen der Regelstrecke und die Aufschaltung der geschätzten Störgrößen und im Vektor lassen das Sensormoment Tsensor dem Sollhandmoment Treq in einem engen Toleranzband folgen.
Die Regelung weist eine hohe Bandbreite von 70Hz auf, die durch die aktive Dämpfung der durch den elastischen Drehstab bedingten Schwingungen erreicht wird.
Die Vorgabe des gewünschten Lenkgefühls erfolgt durch ein überlagertes Sub¬system, dessen Funktionsweise und Realisierung in den folgenden Kapiteln