
Eine flexibel konfigurierbare Modellumgebung für die Fahrdynamiksimulation
AUTOREG 2006, Steuerung und Regelung von Fahrzeugen und Motoren. Wiesloch, 07.-08. März 2006.
S. Klotzbach
DMecS Development of Mechatronic Systems GmbH & Co. KG, Köln, www.dmecs.de
T. Herfeld, H. Henrichfreise
Labor für Mechatronik (CLM), Fachhochschule Köln, www.clm-online.de
Kurzfassung
Dieser Beitrag beschreibt eine auf Matlab/Simulink basierende Modellumgebung für die Fahrdynamiksimulation. Mit ihr werden Fahrzeugmodelle, zugeschnitten auf eine bestimmte Entwicklungsaufgabe, flexibel konfiguriert. Dies wird durch eine komponentenbasierte Struktur unterstützt, in die Modelle von Fahrzeugkomponenten wie Aufbau und Räder, Fahrwerk, Reifen, Antriebsstrang etc. eingefügt werden. Eine Bibliothek mit echtzeitfähigen Modellen bildet dafür die Grundlage. Darüber hinaus unterstützt ein selbst entwickeltes Software-Tool das Aufstellen der Modellgleichungen für Fahrzeug-Mehrkörpersysteme. Damit besitzt die Modellumgebung ein großes Anwendungsspektrum im Bereich der Fahrdynamiksimulation und Entwicklung von Fahrzeugkomponenten. Dies wird anhand von Beispielen dargestellt.
Veröffentlichung und Vortrag downloaden:
1 Einleitung
Innovationen in der Fahrzeugtechnik sind immer häufiger geprägt durch aktive Systeme, die einen gezielten Eingriff in das Fahrverhalten ermöglichen und somit für mehr Sicherheit und Komfort sorgen. Zu deren Entwicklung setzt sich die mechatronische Entwicklungsmethodik zunehmend durch und löst konventionelle Methoden ab. Die modellbasierte Vorgehensweise ermöglicht es, Aktorik, Mechanik, Sensorik sowie Steuer- und Regelalgorithmen in einem ganzheitlichen Entwurf optimal zu gestalten und aufeinander abzustimmen. In diesem Rahmen gewinnen Fahrzeugmodelle und die HIL-Simulation immer mehr an Bedeutung.
In einem Kooperationsprojekt der DMecS - Development of Mechatronic Systems GmbH & Co. KG und dem Labor für Mechatronik (Cologne Laboratory of Mechatronics, CLM) der Fachhochschule Köln wurde eine Modellumgebung für die Fahrdynamiksimulation entwickelt. Diese enthält ein modular aufgebautes Simulationsmodell, eine Bibliothek mit Komponentenmodellen und verschiedene Software-Werkzeuge. Damit lassen sich Fahrzeugmodelle für unterschiedliche Aufgabenstellungen flexibel konfigurieren.
2 Simulationsmodell
Das in Bild 1 dargestellte Simulationsmodell enthält in der ersten Modellebene Subsysteme für Fahrer und Straße, für die einzelnen Fahrzeugkomponenten Aufbau und Räder, Radaufhängung, Motor, Antriebsstrang, Bremsanlage, Lenkung und Reifen, für Aerodynamik, Steuerungs- und Regelungsfunktionen (ABS, ASR etc.) sowie für die Realisierung von Schnittstellen bei einer HIL-Anwendung.
Die Einbindung von eigenen Komponentensubsystemen in die Modellstruktur ist ebenfalls möglich. Alle Subsysteme kommunizieren über einen Signalbus, der die Ausgangssignale der einzelnen Komponentenmodelle in Sub-Bussen enthält.
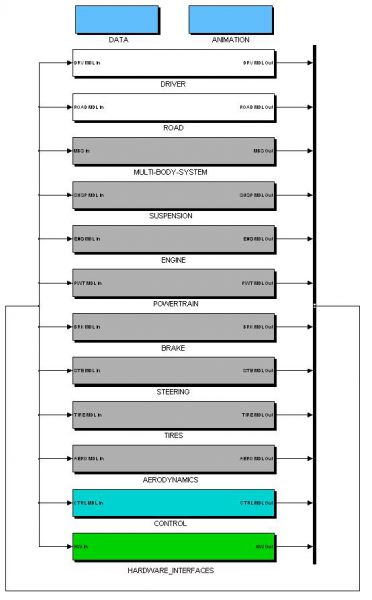
Bild 1: Erste Modellebene mit Komponentensubsystemen
Den Aufbau der Komponentensubsysteme in der zweiten Modellebene zeigt Bild 2.
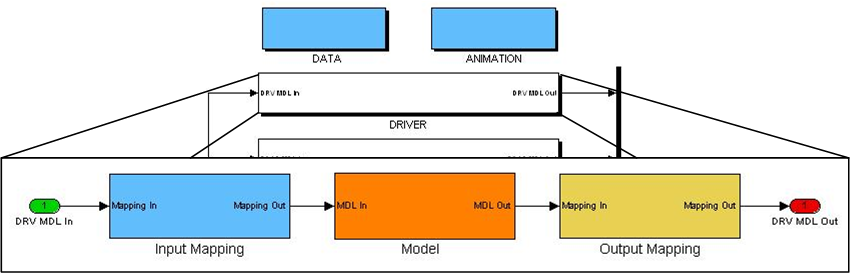
Bild 2: Zweite Modellebene eines Komponentensubsystems und Verbindung zu Subsystemen für den Zugriff auf Daten und die Animation
Neben einem Modell-Subsystem, in dem sich das eigentliche Komponentenmodell befindet, sind in dieser Modellebene sogenannte Mapping-Subsysteme enthalten. Diese Subsysteme stellen Verbindungen zu einem Daten- und einem Animations-Subsystem auf der ersten Modellebene her. Im Daten-Subsystem werden die Ausgänge der Komponentenmodelle gesammelt, so dass für die Ergebnisdarstellung auf alle benötigten Signale an einer zentralen Stelle zugegriffen werden kann. Zusätzlich besteht die Möglichkeit, die Eingänge der Komponentenmodelle mit Testsignalen zu beschalten. Auf diese Weise kann komfortabel überprüft werden, ob ein Komponentenmodell bei einer bestimmten Anregung die erwarteten Zeitantworten liefert, ohne es aus dem Simulationsmodell herauslösen zu müssen. Das Subsystem für die Animation verarbeitet die für die dreidimensionale Darstellung der Fahrzeugbewegungen benötigten Signale. Durch diesen Aufbau des Simulationsmodells ist der Zugriff auf Signale unabhängig von den gewählten Komponentenmodellen.
Das Modell-Subsystem enthält, wie in Bild 3 dargestellt, in einer dritten Modellebene weitere Subsysteme für die Anpassung der Ein- und Ausgangssignale und die Implementierung der eigentlichen Modellgleichungen.
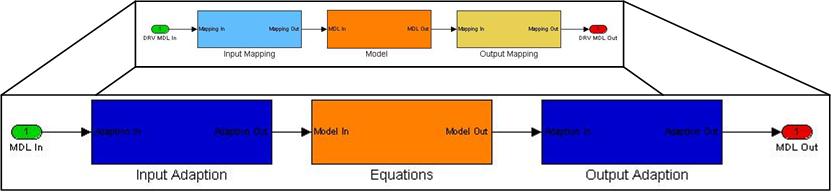
Bild 3: Dritte Modellebene mit Subsystemen für die Signalanpassung und Implementierung der Modellgleichungen
Eine Anpassung der Signale kann beim Einsatz von Komponentenmodellen, die nicht aus der Modellbibliothek stammen, erforderlich sein. Solche Modelle können